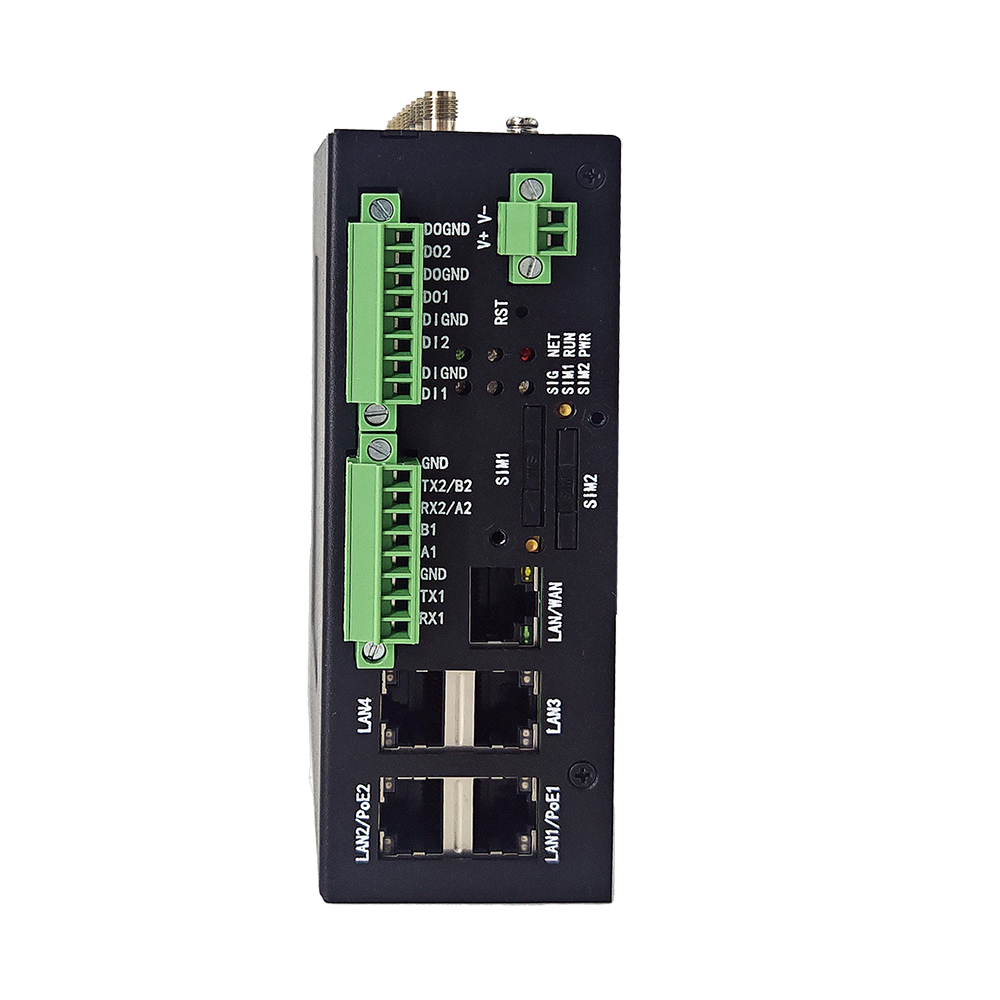
5口工業級路由器/網關/CPE-AR7091F
AR7091F是一款工業物聯網蜂窩路由器,它已在M2M領域得到廣泛應用,如智能交通、智能電網、郵政服務、工業自動化、遙測金融、銷售點系統、供水、環境保護、郵政、天氣等。

 愛陸通雙展預告!11月18-20歐洲電力展Enlit Europe與···
愛陸通雙展預告!11月18-20歐洲電力展Enlit Europe與···
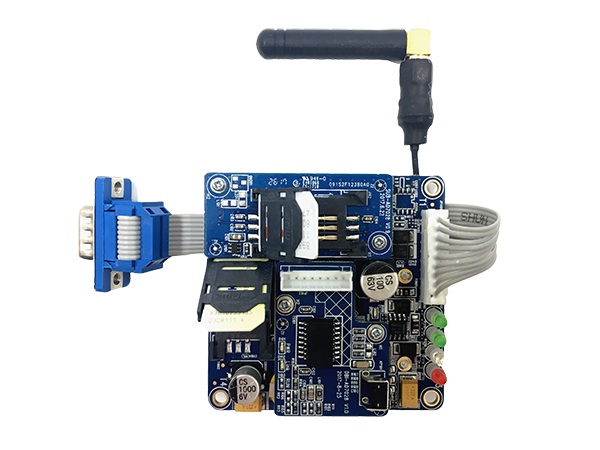
 工業DTU采用Modbus協議傳輸有什么優勢
工業DTU采用Modbus協議傳輸有什么優勢
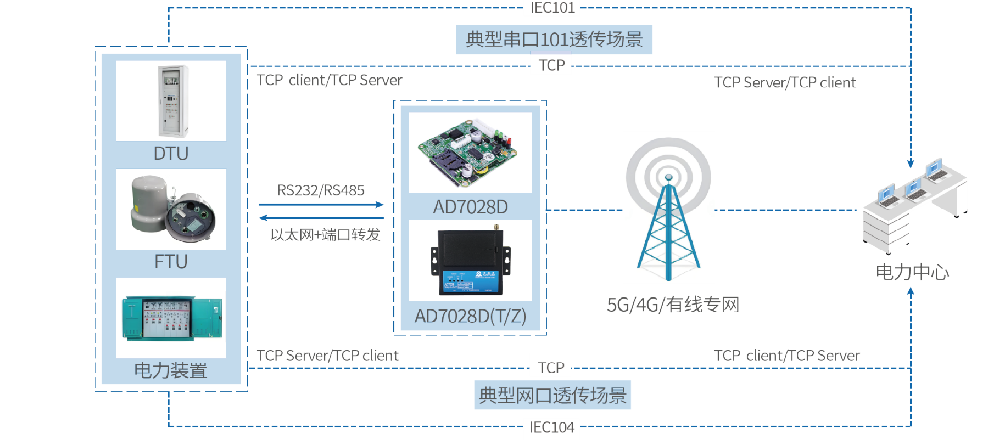
 集中式DTU通信解決方案-智能配網
集中式DTU通信解決方案-智能配網
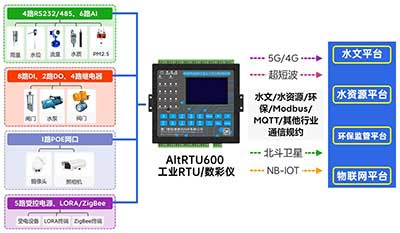 5G視頻RTU 視頻數采儀 數據采集傳輸儀
5G視頻RTU 視頻數采儀 數據采集傳輸儀
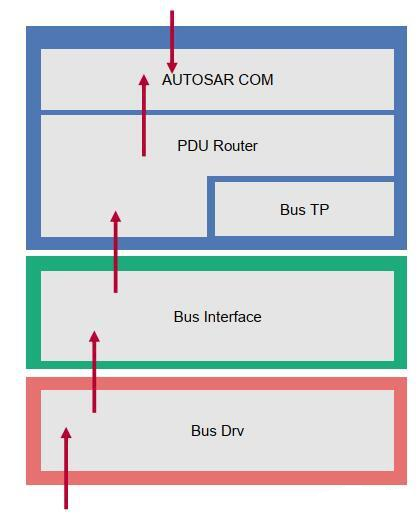
CAN總線數據接收示意(圖源:Vector)
CAN是一種多主控、同步串行通信協議,專為嵌入式系統之間的數據交換設計。它允許多個節點通過一個雙線(CAN_H和CAN_L)總線同時通信,這種設計不僅簡化了布線,還避免了傳統通信方式中常見的沖突問題。
高可靠性:CAN采用差分信號傳輸,有效抑制了共模干擾,同時結合CRC(循環冗余校驗)和錯誤計數器等機制,確保數據傳輸的準確性。
實時性:CAN協議通過獨特的仲裁機制,允許具有高優先級的消息優先傳輸,滿足實時應用的需求。
靈活性:CAN總線可以連接多個節點,每個節點都可以作為發送者或接收者,且節點之間無需主從關系,提高了系統的靈活性。
成本效益:CAN的硬件需求較低,布線簡單,適用于大規模應用,降低了整體成本。
CAN協議定義了四種幀類型:數據幀、遠程幀、錯誤幀和過載幀。其中,數據幀是最常用的,用于實際的數據傳輸。
數據幀的結構包括起始位(SOF)、標識符(Identifier)、控制字段(Control Field)、數據字段(Data Field)、CRC字段(CRC Field)、ACK字段(Acknowledge Field)和結束位(EOF)。其中,標識符用于表示消息的優先級和內容,標準幀為11位,擴展幀為29位;控制字段包含數據長度碼(DLC),指示數據字段的字節數;數據字段最多可包含8字節的數據。
CAN總線采用非破壞性仲裁機制解決總線訪問沖突。節點在發送數據前,首先監聽總線狀態。當多個節點同時發送數據時,根據標識符的優先級進行仲裁,優先級高的節點繼續發送,而優先級低的節點則暫停發送,等待下一次總線空閑。這種機制確保了高優先級消息的及時傳輸。
CAN協議具有完善的錯誤處理機制,包括位錯誤、填充錯誤、CRC錯誤、格式錯誤和確認錯誤等。當節點檢測到錯誤時,會立即發送錯誤幀,并重傳數據。錯誤計數器用于跟蹤節點的錯誤狀態,當計數器超出特定閾值時,節點進入“總線關閉”狀態,停止通信,防止影響總線上的其他節點。
CAN通訊在汽車電子系統中發揮著至關重要的作用。從發動機控制單元(ECU)到防抱死制動系統(ABS),再到車身控制模塊(BCM),CAN總線將這些復雜的電子系統緊密連接在一起,實現了高效、準確的數據傳輸和控制。
在工業自動化領域,CAN協議被廣泛應用于機器間的數據交換和控制。基于CAN的協議如CANopen和DeviceNet,為工業設備的網絡化和模塊化控制提供了有力支持。這些協議使得不同廠商的設備能夠無縫集成,提高了生產效率和靈活性。
現代醫療設備也廣泛采用CAN協議進行數據傳輸和設備控制。手術機器人、病人監護儀和成像設備等,都依賴于CAN總線實現高效、安全和實時的醫療服務。CAN的高可靠性和實時性確保了醫療設備的穩定性和準確性。
實現CAN通訊需要特定的硬件支持,包括CAN控制器和CAN收發器。常見的CAN控制器芯片如MCP2515和TJA1050等,它們負責處理CAN協議的各個層次。CAN收發器則負責將CAN控制器輸出的數字信號轉換為適合總線傳輸的差分信號。
CAN通訊的軟件實現包括配置CAN控制器、初始化CAN總線、發送和接收數據幀等步驟。常用的開發環境如Arduino、STM32和Microchip的MPLAB等,提供了豐富的庫和示例代碼,幫助開發者快速上手。
在STM32微控制器上實現CAN通訊,需要配置外設時鐘、CAN引腳、CAN外設和過濾器等。通過HAL庫提供的API函數,可以方便地實現CAN數據的發送和接收。
在CAN通訊的開發過程中,調試工具如CAN分析儀和示波器是必不可少的。CAN分析儀可以實時監控總線上的數據幀,幫助開發者分析和解決通信問題。示波器則用于觀察總線上的信號波形,確保信號的完整性和穩定性。